
KAVAN Beta 1400 - Instruction manual
Introduction
Congratulations on your purchase of the motor-powered glider BETA 1400. You are about to embark on a magical journey into the fascinating world of electric-powered RC aeroplanes. The BETA 1400, manufactured of virtually unbreakable EPO foam, is packed with the latest 2.4GHz radio technology features. It is powered with a mighty brushless motor and the LiPo batteries will help you become an experienced pilot in no time. BETA 1400 is not just an entry-level plane but quite a good thermal glider that will please any Sunday pilot - a newcomer as well as a seasoned pro.


KAV02.8084 / KAV02.8084RTF KAVAN Beta 1400 - blue | KAV02.8085 / KAV02.8085RTF KAVAN Beta 1400 - red
Features
- 100% factory-made, partially assembled model
- Aileron, elevator, rudder and throttle control
- Easy handling and high stability; durable, virtually unbreakable electric motor-powered glider
- Powerful brushless outrunner motor
- Large wing area, low weight
- Advanced 2.4GHz eight-channel radio (RTF Set only)
- Lightweight LiPo flight pack (RTF Set only)
- Fast charger for the flight pack (RTF Set only)
Technical specifications
| Wingspan | 1400 mm |
| Length | 966 mm |
| All-up weight | 700–770 g |
| Wing area | 24.5 dm² |
| Wing loading | 28.6–31.4 g/dm² |
| Motor | C2814-1400 outrunner |
| ESC | KAVAN R-20B 20 A with BEC 5 V |
Safety precautions
General Warnings
An RC aeroplane is not a toy! If misused, it can cause serious bodily harm and damage to property. Fly only in a safe place, following all instructions and recommendations in this manual. Beware of the propeller! Keep loose items that can get entangled in the propeller away from the spinning propeller, including loose clothing or other objects such as pencils and screwdrivers. Ensure that your and other people’s hands and face are kept away from the rotating propeller.
Note on Lithium Polymer Batteries
Lithium Polymer batteries are significantly more vulnerable than alkaline or NiCd/NiMH batteries used in RC applications. All manufacturer’s instructions and warnings must be followed closely. Mishandling of LiPo batteries can result in fire. Always follow the manufacturer’s instructions when disposing of Lithium Polymer batteries.
Additional Safety Precautions and Warnings
As the user of this product, you are solely responsible for operating it in a manner that does not endanger yourself and others or result in damage to the product or the property of others. This model is controlled by a radio signal subject to interference from many sources outside your control. This interference can cause momentary loss of control, so it is advisable to always keep a safe distance in all directions around your model, as this margin will help to avoid collisions or injury.
Never operate your model with low transmitter batteries.
Always operate your model in an open area away from power lines, cars, traffic, or people.
Avoid operating your model in populated areas where injury or damage can occur.
Carefully follow the directions and warnings for this and any optional support equipment (chargers, rechargeable batteries, etc.) which you use.
Keep all chemicals, small parts and anything electrical out of the reach of children.
Moisture causes damage to electronics. Avoid water exposure to all equipment not specifically designed and protected for this purpose.
Never lick or place any portion of your model in your mouth, as it could cause serious injury or even death.
Set contents
RTF Set:
- 100% factory-made, partially assembled model (4 servos GO-09, brushless motor, 20A ESC, 7×6” prop)
- 2.4GHz 8-channel transmitter and 8-channel receiver
ARTF Set:
- 100% factory-made, partially assembled model (4 servos GO-09, brushless motor, 20A ESC, 7×6” prop)
You will also need
For the RTF Set:
4 AA batteries for the transmitter or the specially-made transmitter pack KAVAN KAV33.1051804RL.
Tools: Small Phillips and flat screwdrivers, 1.5mm hex key or screwdriver.
Glue: Medium or thick cyanoacrylate glue (e.g. KAV56.9952 or KAV56.9953), low or medium strength threadlocker (blue - e.g. KAV56.9970).
For the ARF Set:
At least a 4-channel transmitter and receiver, LiPo flight pack 11.1 V 1600–2700 mAh.
Tools: Small Phillips and flat screwdrivers, 1.5 mm hex key or screwdriver.
Glue: Medium or thick cyanoacrylate glue (e.g. KAV56.9952 or KAV56.9953), low or medium strength threadlocker (blue - e.g. KAV56.9970).
Receiver

The receiver aerial should be positioned so the active part (the last 30 mm with translucent insulation) is as straight as possible.
The black (or dark grey) part of the aerial is a feeder (coaxial cable) that does not take any part in the signal reception. You can bend it if necessary - carefully and not at a sharp angle - a gentle arc is what we are looking for here.
The aerial should be secured e.g. to the side of the fuselage with strips of sticky tape.
The active part of the aerial has to be located as far as possible from conductive parts of your model (wires, battery pack…)
T8FB transmitter controls
| Channel and function | Aileron (CH1) | Elevator (CH2) | Throttle (CH3) | Rudder (CH4) |
| Default position | R (Down) | N (Up) | N (Up) | N (Up) |

- Rotary Knob VrA (CH8)
- Switch A (SwA, CH7)
- Elevator/Rudder Stick (Mode 1) Throttle/Rudder Stick (Mode 2)
- Elevator Trim (Mode 1) Throttle Trim (Mode 2)
- Rudder Trim
- Neckstrap Hook
- Aileron Reverse Switch (AIL)
- Elevator Reverse Switch (ELE)
- Antenna
- Transmitter Handle
- Rotary Knob VrB (CH6)
- Switch B (SwB, CH5)
- Throttle/Aileron Stick (Mode 1) Elevator/Aileron Stick (Mode 2)
- Throttle Trim (Mode 1) Elevator Trim (Mode 2)
- Aileron Trim
- ON/OFF Switch
- Rudder Reverse Switch (RUD)
- Throttle Reverse Switch (THR)
Transmitter
System: 2.4GHz FHSS
Frequency Range: 2.400–2.4835 GHz
Output Power: <20 dBm (Tx)/<4 dBm (BT)
Input voltage: 4.8–11.1 V (4× AA alkaline batteries or NiMH accumulators, 2S or 3S LiPo)
Receiver (2.4 GHz FHSS)
Frequency Range: 2.400–2.4835 GHz
Output Power: –
Range: ca 500 m on the ground, ca 1000 m in the air
Input voltage: 4.8–10.0 V
Dimensions: 48,5×21×11 mm / Weight: 7 g
Transmitter (RTF set version)
Loading the transmitter batteries
Remove the battery compartment hatch on the back side of the transmitter, pushing the cover at the arrow mark with your thumb. Load 4 fresh alkaline batteries or AA-size accumulators, carefully keeping the correct polarity (marked on the bottom of the battery holder). Plug the battery holder cable into the socket at the bottom of the battery compartment, keeping the correct polarity (+) red wire, (-) black wire. (The transmitter features a protection circuitry – if you connect the plug the other way around, the transmitter will not work but will not get damaged by reversed polarity.)
We especially recommend low self-discharge NiMH battery pack KAVAN made specially for the T8FB (KAV33.1051804RL), or AA-size batteries such as the Panasonic Eneloop® 1900 mAh or KAVAN 2000mAh (KAV33.10103).
Put the battery compartment hatch back in place.
Charging the transmitter batteries
Charge the batteries before the first flight.
Checking the transmitter battery
Turn on the transmitter and check the LED on the front panel - both the red and green have to glow. These LEDs indicate the status of the transmitter, not the transmitter battery voltage. The low-battery alarm is acoustic - once you hear beeping, land immediately and replace/recharge the batteries. If the transmitter beeps immediately after turning on, DO NOT try to fly at all.
Checking the Servo Reverse Switches position
Set the servo reverse switches to the default position - CH1 DOWN (R), CH2, CH3 and CH4: UP (N). Turn the transmitter off.
Charging the flight battery
Your BETA 1400 is to be powered by a 3-cell LiPo battery pack. The LiPo battery supplied in the RTF Set features two connectors: one is for the balanced charge of the cells (JST-XH type) and the other one is dedicated to the discharge (XT60). The RTF set contains a dedicated KAVAN C3 (KAV34.1003) wall fast charger (230 V/50 Hz) designed for charging the flight pack using the balance cable.
Charging the Flight Battery (RTF Set)
1) Connect the power cable to the charger.
2) Plug the charger's power cable into the mains socket (230 V/50 Hz). All the LEDs glow green and flash red, indicating the charger is ready to charge.
3) Plug the balance connector of your flight battery (JST-XH) into the corresponding socket on the charger.
4) The charger starts charging. LEDs will glow red. If a 2S pack is connected, Cell 1 and Cell 2 LEDs will glow red; if a 3S pack is connected, Cell 1, Cell 2 and Cell 3 LEDs will glow red.
5) Once a particular cell in the flight battery is charged, the corresponding LED will glow green. 2S pack will be fully charged if Cell 1 and Cell 2 LEDs glow green; 3S pack will be fully charged, if Cell 1, Cell 2 and Cell 3 LEDs glow green.
6) Disconnect the flight battery from the charger; LEDs will glow green, indicating the charger is ready to charge another pack. Unplug the charger from the mains socket if you are not charging another battery.
In the charging process, keep your charger and your battery in a cool and dark place, away from any possible source of fire. Do not cover the charger or the battery with clothes or similar: ventilation is crucial for the necessary cooling of the devices.
Assembly
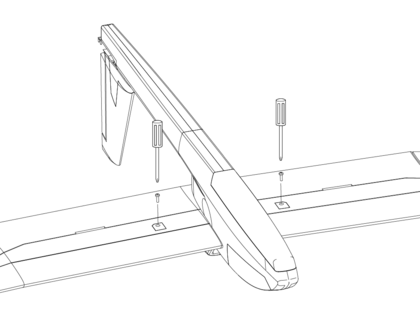
Wing
Locate the carbon tube wing joiner, insert it into the housing in the fuselage and slide both wing halves onto the joiner.
Connecting the aileron servos:
A. A radio featuring only one aileron channel (like the T8FB supplied in the RTF set): Connect both aileron servos to the Y-cable. Connect the aileron Y-cable to the aileron channel of your receiver (CH1 in the case of T8FB).
B: A radio featuring two independent aileron servo channels: Use two 20–30cm extension cables (not supplied in the kit) to connect aileron servos to your receiver (typically, CH1 and CH5 or CH6 – it depends on the transmitter and its setting – please refer to the instruction manual of your radio).
Secure the wing halves by carefully tightening the setting screws on the bottom side of the wing.



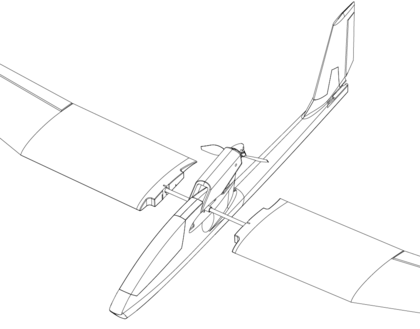
Taiplanes
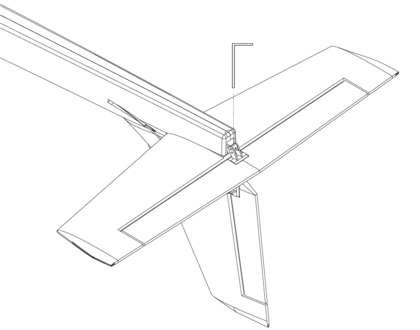
Glue the horizontal tailplane into the fuselage using medium or thick cyano. Be sure the elevator horn is on the bottom side.
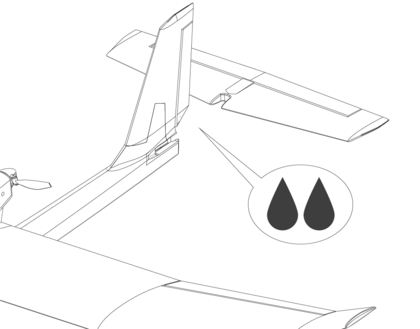
Before the glue sets, check the correct alignment of the horizontal tailplane - it has to be square to the fin.
Insert the elevator push rod into the push rod connector in the elevator horn.



RC kit installation

Now you have to install/connect your receiver, servos and electronic speed controller (ESC).
- Remove the canopy: lift the rear part to disengage the magnetic lock.
- Following your radio instruction manual, connect the servos and ESC to your receiver – the table shows the channel assignment of the T8FB radio supplied in the RTF kit:
- Put your receiver into the fuselage (into the rear part of the cockpit). You can secure it using a strip of hook-and-loop tape to the fuselage.
- The flight battery pack is to be inserted into the nose of your BETA 1400 and secured by the hook-and-loop tape to the fuselage - the exact position of the battery pack will be determined later during the centre of gravity (CG) position check.
| Connector label | Function | Receiver channel (T8FB) |
|---|---|---|
| AILE | Ailerons | CH1 |
| ELEV | Elevator | CH2 |
| ESC | Throttle | CH3 |
| RUDD | Rudder | CH4 |
Pre-flight check
Checking the current setup
Assure that the transmitter is turned on (both the LEDs are on with the T8FB). Place all the trims in their neutral positions and set the throttle stick into the lowest position. Connect the flight pack to the ESC - the red LED on the receiver must glow. If it blinks or does not glow at all, the receiver and transmitter require establishing their link by the binding procedure - refer to page 6 in this manual.
Checking the control surface neutrals
Please check that all the control surfaces are in the neutral position if the corresponding transmitter sticks and trims are in the centre position. If not, please loosen the setting screw of the corresponding push rod connector and set the control surface to the neutral position. The elevator and rudder have to be flush with the horizontal stabilizer resp. the fin, both two ailerons have to be flush with the wing trailing edge. Once satisfied, apply a drop of threadlocker to the setting screw a tighten it.Caution: If the quick link gets loose during flight, your model will become partly or completely uncontrollable. Therefore, you should check the linkage regularly.Testing the ailerons
A. Move the aileron stick to the left; (looking from the tail to the nose) the left aileron must move up and the right aileron must drop down simultaneously.
B. Move the aileron stick to the right; the left aileron must drop down and the right aileron must go up simultaneously.
C. Return the aileron stick to the centre (neutral) - both two ailerons will return to the neutral position.Note: If the ailerons are moving in the opposite direction, you will have to reverse the direction by flipping the aileron reverse switch (AIL) on your transmitter.Testing the rudder
A. Move the rudder stick to the left; (looking from the tail to the nose) the rudder must move to the left.
B. Move the rudder stick to the right; the rudder must move to the right.
C. Return the rudder stick to the centre (neutral) - the rudder will return to the neutral position.Note: If the rudder is moving in the opposite direction, you will have to reverse the direction by flipping the rudder reverse switch (RUD) on your transmitter.Testing the elevator
A. The elevator stick is located on the left side of the Mode 1 transmitter or the right side of the Mode 2 transmitter. Pull the elevator stick down; the elevator must move up).
B. Push the elevator stick up; the elevator must move down.
C. Return the elevator stick to the centre (neutral) - the elevator will return to the neutral position.Note: If the elevator is moving in the opposite direction, you will have to reverse the direction by flipping the elevator reverse switch (ELE) on your transmitter.- Control surface throws
A. Radio featuring only one aileron channel Control Low rate Normal rate Expo* Aileron 7 mm up and down 10 mm up and down 10–20 % Rudder 10 mm left and right 12 mm left and right 0–10 % Elevator 6 mm up and down 8 mm up and down 20–30 % B. Radio featuring 2 independent aileron servo channels Control Low rate Normal rate Expo* Aileron 8 mm up/4 mm down 10 mm up/5 mm down 10–20 % Aileron (airbrake) 13 mm up 113 mm up – Rudder 10 mm left and right 12 mm left and right 0–10 % Elevator 6 mm up and down 8 mm up and down 20–30 % Elevator (airbrake) 2 mm up 2 mm up – *Expo – set to decrease the sensitivity around the neutral (Futaba, Hitec, Radiolink, Multiplex: -10/-20, Graupner: +10/+20 etc.) If you carefully followed the instructions in the previous sections of this manual, the correct default control surface throws have been set automatically. The control throws are set by the ratio between the length of the servo arm and the control surface throw - the actual throws set this way are listed in the column "Normal rate" in the table below. (The throws are always measured at the widest point of the particular control surface.) It is always better to try to reach the requested throws mechanically, adjusting the arm/horn length ratio - even if you have a fancy computer radio. If you have such a transmitter, you can use the function "Dual rate" (D/R) to get an even more forgiving setup - please refer to the "Low rate" column. You can also do it mechanically - simply move the push rod Z-bends on the servo arms closer to the centre.
- Testing the Power system
KAVAN T8FB/R-20B: Check the throttle channel reverse switch (THR) is in the "N" (up) position on the transmitter. Now perform the throttle range calibration procedure as described in the KAVAN R-20B manual (refer to the KAVAN ESCs - Instruction manual) and check the motor brake function has been turned on.
A) Turn on the transmitter, set the throttle stick to the lowest position, and connect the flight pack to the ESC in the model (ESC has to be set to the "Brake OFF" mode - if your ESC features this option). If the prop rotated slowly, please check the position of the throttle stick and throttle trim.
B) Slowly move the throttle stick up, the prop should start rotating clockwise (looking from behind). If it spins in the opposite direction, pull the throttle stick back, disconnect the flight battery and swap any two of the three cables between the motor and the ESC. The re-check again. Repeat the ESC throttle range calibration. Then re-check again.
Note: If the motor does not respond to the throttle stick advance, check the model power cable connection and the state of charge of your battery.Caution: Keep away from the propeller once the battery is connected to the model. Do not try to stop the propeller with your hands or anything else. - Centre of gravity
A) The CG has to be located 70–75 mm behind the leading edge of the wing. Balance your BETA 1400 supporting the wing with your fingertips 70 mm behind the leading edge for the first flight.
B) You can fine-tune the CG position later to suit your requirements. Moving the CG forward the model flight will be more stable. Moving backwards, the controls will become more sensitive, also the thermalling performance might improve slightly.Note: Moving back the CG too much could make your model hard to control or even so unstable, that you would not be able to control it at all.Now you are ready to fly.
Flying
Choosing the field and weather
Flying Field
The flying field should be a flat grassy area. There should be no cars, persons, animals, buildings, power lines, trees, large stones or any other obstacles that BETA 1400 might collide with within the range of ca 150 m. We highly recommend you join a local model flying club – you will get access to their flying field, along with advice and help to make your first steps into model flying much easier and safer.
Weather
Calm summer evenings are perfect for the maiden flight. Your BETA 1400 is a light thermal glider that is the happiest with wind under 5 m/s. DO NOT fly when it is raining or snowing, on foggy days. Thunderstorms are clearly not the right time to fly either.
Range check
Perform the range check as described in the instruction manual of your radio. Ask a friend to hold the transmitter, and walk away holding the model in a regular flight position at the height of your shoulders. The servos have to respond to control inputs (control stick movements) without any glitching or jitter, with the motor off and at full throttle within the range stated by the radio manufacturer. Only prepare to fly if the range check is 100% successful.
First flight
Now, the most important advice in this entire manual:
During the first flight, we recommend that you have the support of an experienced RC pilot.
There is no shame in asking for help – new full-size aircraft are test flown by skilled factory test pilots – and only then are regular pilots allowed to take control. RC model control requires some skills and reflexes people are not born with. It is not complicated to gain these skills – it just takes some time. That will vary with your natural talent. Full-size pilots start under the supervision of a skilled instructor; they learn to fly at a safe altitude at first, learn landing and take-off techniques, and only then are they allowed to fly solo. The same principles apply to RC models, too. Please do not expect you will be able to put your model in the air and fly it without any previous RC experience. Many will have gained skills in controlling their favourite computer game character by hammering the control buttons or sticks. For model flying, this skill will have to be unlearnt! The stick movements required to control your model are small & gentle. Many models, including BETA 1400, are happier if you let them "fly by themselves" for most of the time, with small and gentle stick movements to simply guide the model in the required direction. RC flying is not about stick hammering, it is all about small stick movements, and observing the effect of those stick movements. Only later is it possible to anticipate the effect of larger stick movements that can be dangerous to your model in the earlier stages of model flying.

Step 1: Hand launch and initial trimming
The model must be launched into the wind every time. Throw grass into the air to observe the wind direction.
Turn on your transmitter.
Connect and put the flight pack into the battery compartment and secure the canopy.
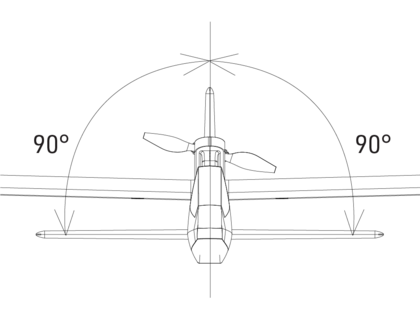
Hold your model with the wings and fuselage level (refer to the drawing) – it is better to ask a friend to launch your model than to do everything by yourself – you can then concentrate on the controls.
Give the model full throttle and launch your model with a gentle push straight and level. You will feel the point at which the model is trying to fly naturally. Don't push it too strong. Do not throw your model with the nose up, or greater than 10 degrees down. The model must have a certain minimum speed from the very start to stay airborne. It is not enough to just "put" your model in the air.
Launch the model against the wind.
If everything is OK, BETA 1400 will climb gently. If your BETA 1400 loses altitude, pull the elevator stick very slightly towards you (just a little!) to achieve a steady climb.
Step 2: Flying
Keep your BETA 1400 climbing until it reaches at least 50 m in height, then throttle back the motor enough to maintain the flight level. The real flying fun begins now.
How to control your model?
In contrast to cars or boats, aircraft fly in three-dimensional space making the full control more complex. Turning the steering wheel left or right makes a boat or car turn left or right, applying more throttle the vehicle speeds up – and this is it. Moving the control sticks left or right has more effect than simply turning the model. The aileron and rudder control will be explained later.
Please note that the control is fully proportional – the more you move the stick, the more movement of the control surface. The actual stick movement required is mostly quite small, and rarely from one end stop to the other.
Elevator
The levator controls the model on the vertical axis. Push up the elevator, and your model’s nose will rise (and the model will climb if it has sufficient power). Pull down the elevator, and your model will descend. Please note that your model can only climb if enough throttle is applied. Your model will not necessarily climb just because you have pushed up the elevator and will usually need full power applied for a safe, gentle climb. If the climb angle is too great or the power applied is insufficient, your model will lose flying speed until the minimum (stall) speed. At the stalling speed (when the airflow starts to break away from the upper surface of the wing), your model will start to feel as though it is not responding as normal to control inputs and then drop with little warning – pull down the elevator to regain flying speed and full normal control.
Ailerons
Ailerons control the bank angle. If you gently move the aileron stick to the left, your model will start to bank to the left as long as you are holding the stick. Now, if you return the aileron stick to the centre position (neutral), your model will maintain the bank. If you want to resume a straight flight, move the aileron stick in the opposite direction.
.png)
Rudder
The rudder of a model without ailerons (you might be already familiar with) controls the bank angle, which then controls the rate of turn. The natural stability of your model keeps the wings level in normal straight flight. Since your BETA 1400 features "full-house" controls, including ailerons that are the main means to control the bank angle, the use of the rudder is slightly different. You can even start to control your model without using the rudder, but later, you will learn the correct coordinated turn actually requires both aileron and rudder inputs.
Any turn requires an appropriate bank angle – BETA 1400 will fly nice big and safe flat turns with only a small bank angle. During initial flights, never use a bank angle of greater than 45 degrees. By planning the direction that the model will take, normal turns will be made with less than 30 degrees of bank.
Move the rudder to the left a little way, and your model will bank into a gentle turn. Increase the rudder input a little more, and your model will continue turning to the left, but it will also start to descend (this is a good time to move the control stick to the centre to allow your model to recover from the dive!).
Why does your model descend when only a rudder is applied?
Once the rudder leaves its exact vertical position, it also starts to behave as an elevator turned down, telling your model to dive. When in a banked turn, to maintain level flight, it is necessary to apply a little up elevator to counter the effect of the down-turned rudder. (Actually, the reason why your model descends in the bank is much more complex - the wing gives less lift in the bank as the vertical projection of the wing is the area that counts, and you also have to beat the inertia that tries to keep your model in the straight flight…) The elevator applied when your model is in a banked turn also works like a rudder - fortunately, it helps to maintain the turn.
In practice, the ailerons are used to put your model to the desired bank angle. The rudder is used to maintain it. The elevator input helps control the height whilst also increasing the rate of turn.
Alternatively, you can use only the ailerons to bank your model, then turn your model using just the elevator and finally resume the straight and level flight with the opposite deflection of ailerons.
We have got through about 3/4 of the turn and it is the time to think about returning to straight and level flight in the desired direction. Return the controls to the middle position (you may need to correct the turn with little right ailerons and/or rudder). If necessary, give slight elevator input to settle your model into a straight and level flight.
If you take a look at our drawing on the right, you will notice that it takes some time until the model actually starts to turn. And, when leaving the turn, you have to start applying the opposite ailerons and rudder sooner than when the nose of your model is pointing to the desired final direction. The elevator and rudder rates are marked with dotted lines – this is because you cannot tell exactly the track the model will take during a gentle banked turn or entry to a straight and level flight.
Congratulations!
You learnt how to achieve a coordinated turn using the rudder and elevator. Remember that model aircraft control is about guiding your model in the desired direction rather than precise steering. Another complication is the rudder control. It is easy and natural while the model is flying away from you, but when your model is flying towards you, the direction of the control commands has to be reversed. A simple trick, when the model is flying towards you, is to move the control stick towards the wing that you want to lift, imagine supporting the wing by moving the stick under that wing – it works!
Final setup
Now is the time for the final setup. Fly your BETA 1400 straight into the wind and leave the controls in the neutral position. If the model turns in one direction, apply the rudder trim in the opposite direction until BETA 1400 flies straight. Without power, your model must settle into a gentle glide, not too fast so that it plummets to the ground, and not so slow that the controls feel "soggy" and the model is on the edge of the stall. Apply the elevator trim in the way described in the initial trimming section.
If your model banks to a side, apply a little of the aileron trim in the opposite direction.
Powered and unpowered flight
The model has already been fine-tuned for the unpowered phase of flight. When you turn the motor on, your model might tend to pitch the nose up when full throttle is applied. You cannot completely trim out this tendency with any motor-powered glider – just be aware of this characteristic when flying your model. In practice, you might have to make slight elevator corrections to maintain a gentle but positive climb.
Landing
When the power available starts to reduce check that your landing field is clear of people and other obstructions. Position your model about 10–20 m off the ground at the downwind end of your field. Make the final approach into the wind, keeping the wings level all the time as your model descends slowly and finally settles gently onto the ground. With more practice, you will be able to use a little up elevator to "round out" (slow down the model) at less than 1 m off the ground.
Appendix
Transmitter and receiver binding
The control signal of a 2.4GHz transmitter contains a unique identification code that allows the receiver to recognise the signal of “its own” transmitter and respond only to the correct signal, no matter how many other 2.4 transmitters are operating in the vicinity. When a 2.4GHz RC kit is prepared for the first use and always when a new receiver is to be used with your transmitter, you have to perform a procedure called “binding” to establish the link between your transmitter and receiver. During this process, the receiver will recognize the ID of your transmitter and store it in its memory. From now on it will respond just to the signal of your transmitter.
T8FB/R8EF Binding Procedure
1. Place the transmitter and the receiver close to each other (within one meter).
2. Turn your transmitter ON and then your receiver.
3. There is a black binding button on the side of the R8EF receiver; press and hold the receiver binding button for about 2 seconds until the LED starts to blink on the receiver. After about 8 blinks the process is finished and the receiver LED will glow red steady.
4. Turn the receiver off and then on again; check the correct operation of all servos.
Repairs and maintenance
- Please perform the range check at the beginning of each flying session.
- Before every take-off please check the correct control surface movement.
- After every landing check the plane for any damage, loose push rod connectors or push rods, bent undercarriage, damaged propeller etc. Do not fly again until the damage is repaired.
Although your BETA 1400 is manufactured of the extra tough and virtually unbreakable expanded polyolefin (EPO) foam, damages or broken parts may occur. Minor damage can be repaired simply by glueing the parts together with cyanoacrylate (CA) glue or with clear sticky tape. In case of major damage, it is always better to purchase a brand-new spare part. A wide range of genuine spare parts and accessories is available through the KAVAN dealers.
In the unfortunate event of a crash or heavy landing, no matter how minor or major, you must lower the throttle stick to its lowest position as quickly as possible to prevent damage to the electronic speed controller in the control unit.
Failure to lower the throttle stick and trim to the lowest possible positions in the event of a crash could result in damage to the ESC, which may require replacement of the ESC.
KAVAN R-20B instructions
Please refer to the KAVAN ESCs - Instruction manual.
Recycling and Waste Disposal Note (European Union)

Electrical equipment marked with the crossed-out waste bin symbol must not be discarded in the domestic waste; it should be disposed of via the appropriate specialised disposal system. In the countries of the EU (European Union) electrical devices must not be discarded via the normal domestic waste system (WEEE - Waste of Electrical and Electronic Equipment, Directive 2012/19/EU). You can take your unwanted equipment to your nearest public collection point or recycling centre, where it will be disposed of in the proper manner at no charge to you. By disposing of your old equipment in a responsible manner you make an important contribution to safeguarding the environment.
EU Declaration of Conformity

Hereby, KAVAN Europe s.r.o. declares that the radio equipment type: BETA 1400 with T8FB RC set and the accessories supplied with them is in compliance with Directive 2014/53/EU. The full text of the EU Declaration of Conformity is available at the following internet address: www.kavanrc.com/doc/ This 2.4GHz radio equipment can be used without any prior registration or individual authorisation in the entire European Union, Switzerland and Norway.
Guarantee
The KAVAN Europe s.r.o. products are covered by a guarantee that fulfils the currently valid legal requirements in your country. If you wish to make a claim under guarantee, please contact the retailer from whom you first purchased the equipment. The guarantee does not cover faults which were caused in the following ways: crashes, improper use, incorrect connection, reversed polarity, maintenance work carried out late, incorrectly or not at all, or by unauthorised personnel, use of other than genuine KAVAN Europe s.r.o. accessories, modifications or repairs which were not carried out by KAVAN Europe s.r.o. or an authorised KAVAN Europe s.r.o., accidental or deliberate damage, defects caused by normal wear and tear, operation outside the Specification, or in conjunction with equipment made by other manufacturers. Please be sure to read the appropriate information sheets in the product documentation.