
KAVAN Smart PRO GPS2 Logger - Bedienungsanleitung
Einleitung
Herzlichen Glückwunsch zum Kauf des Smart PRO GPS2 Loggers, einem Telemetriegerät, das eine schnelle und genaue Positionserkennung in Echtzeit und ein Feedback bietet. Dieser Logger verwendet mehrere Satellitennavigationssysteme, um maximale Genauigkeit und Auflösung zu erreichen. Der integrierte Speicher Flash ermöglicht eine Aufzeichnung aller Daten. Die aufgezeichneten Daten können mit der kostenlosen Software MAV Manager heruntergeladen und auf einem Computer analysiert werden.
Merkmale
- Kleine Abmessungen, hohe Messgenauigkeit
- Großer Industriespeicher für die Datenaufzeichnung
- GPS-Chip-Set der neuesten Generation, das mehrere Satellitensysteme unterstützt
- 3-Achsen-Magnetometer / Kompass für externe Navigationszwecke
- Backup-Superkondensator zum schnellen Wiederauffinden der Position nach der Abschaltung
- Messung und Aufzeichnung der Versorgungsspannung
- Automatische Telemetrie-Erkennung : FPort, Duplex EX, Hott, MSB, S.Bus2, P²Bus.
- Automatische Zeitzonenerkennung
- Konfiguration über den Sender oder das Programm MAV Manager
- Firmware-Updates
Technische Daten
- Abmessungen: 28×30×9 mm
- Gewicht: 14 g
- Speicher: 256 MB
- Unterstützte Navigationssysteme: GPS, GALILEO, GLONASS
- Aufzeichnungszeit (5 Aufzeichnungen/s): 66 Stunden
- Aufzeichnungsfrequenz: 10 Hz, 5 Hz, 2 Hz, 1 Hz
- Lebensdauer des Speichers Flash: 100 000 Überschreibzyklen
- Betriebsstrom: 50 mA
- Betriebstemperatur: (-20)–85 °C
- Versorgungsspannung: 3.5–8.4 V
- Telemetrie: FPort, Duplex EX, Multiplex MSB, Graupner Hott, Futaba S.Bus2, PowerBox P²Bus
- Status LED: JA
- GNSS Empfängerempfindlichkeit: -167 dBm
- GNSS max. Belastung: 4G
Verfügbare Telemetrie
Die Telemetrieoptionen sind abhängig vom verwendeten Funkanlagensystem. Die kompletten Daten werden automatisch im internen Speicher Flash gespeichert.
| Parameter | Beschreibung |
|---|---|
| Zeitstempel | Aktuelle genaue GPS-Zeit. |
| Breitengrad | Koordinaten Nord/Süd. |
| Längengrad | Koordinaten Ost/West. |
| Status | Anzeige von Aktivität (1 = korrekte Position) oder Fehlerzustand. |
| Satelliten | Anzahl der erkannten Satelliten. |
| Abs. Höhe | Höhe über dem Meeresspiegel. |
| Entfernung | Entfernung von der “Startposition“. |
| Geschwindigkeit | 2D/3D-Geschwindigkeit relativ zum Boden. Der Typ der Geschwindigkeitsmessung kann in der Konfiguration eingestellt werden. |
| Rel. Höhe | Höhe relativ zur “Startposition”. |
| Kurs | Flugrichtung. Die Werte liegen im Bereich 0°-359°: 0° = Norden, 90° = Osten, 180° = Süden, 270° = Westen. Ist die Geschwindigkeit gleich Null, wird der Kurs nach dem Kompass berechnet. |
| Azimuth | Die Position des Modells in Bezug auf die “Startposition“. Die Werte liegen im Bereich 0°-359°: 0° = Norden, 90° = Osten, 180° = Süden, 270° = Westen. |
| Temperatur | Interne Temperatur. |
| Magnetometer X/Y/Z | Werte des 3-Achsen-Magnetometers. Können für weitere Berechnungen verwendet werden. |
| Spannung | Empfängerspannung (nur geloggt). |
| Route | Gesamtstrecke, die während des Fluges zurückgelegt wurde (nur geloggt). |
Installation
Schließen Sie den Logger Smart PRO GPS2 an den Telemetrieport des Empfängers an. Platzieren Sie den Sensor oben am Flugzeug, so dass seine Antenne in keine Richtung abgeschirmt ist. Abschirmende Materialien wie Metall, Carbon oder andere leitende Materialien können die Fähigkeit zur korrekten Positionsbestimmung beeinträchtigen. Stellen Sie außerdem sicher, dass die Antennen des 2,4 GHz Systems mindestens 20 cm oder mehr vom GPS Logger-Sensor entfernt sind. Versuchen Sie, den Sensor nicht mechanisch zu belasten. Vermeiden Sie engen Kontakt mit wärmeerzeugenden Komponenten (wie Motoren oder Drehzahlreglern). Verwenden Sie weiches doppelseitiges Klebeband oder Klettband.
Um eine gute Leistung des integrierten Magnetometers zu gewährleisten, installieren Sie das Gerät in einem Abstand von mindestens 20 cm zu magnetisierten Objekten und Kabeln, die die Servos/Motoren versorgen. Achten Sie auf die Ausrichtung des Geräts in Bezug auf die Flugrichtung, wie in der Abbildung unten dargestellt.

Schalten Sie den Empfänger ein, an den der GPS Logger angeschlossen ist. Die rote LED blinkt einmal, um die korrekte Initialisierung anzuzeigen. Nach einigen Sekunden (oder Minuten, wenn das Gerät länger als einen Tag ohne Strom war) meldet der Sensor ”3D Position Fix“, d.h. das Finden der richtigen Position. Von diesem Zeitpunkt an kann die Datenspeicherung im Speicher Flash beginnen, je nach der in der Konfiguration eingestellten Bedingung. Die Aufzeichnung wird durch Blinken der LED synchron mit der Aufzeichnungsfrequenz angezeigt.
Jedes Mal, wenn die Protokollierung gestartet wird, wird eine neue Datei im internen Speicher Flash angelegt. Die Namen der Protokolldateien richten sich nach dem aktuellen Datum und der Uhrzeit und haben folgendes Format:
”GYYYYMMDD HHhNN.log” ( YYYY = Jahr, MM = Monat, DD = Tag, HH = Stunde und NN = Minute). Beispiel: G20210605 20h47.log
Es ist nicht notwendig, alte Aufzeichnungen manuell zu löschen. Wenn nicht genügend freier Speicherplatz vorhanden ist, werden die ältesten Protokolldateien automatisch gelöscht. Das interne Dateisystem ist robust und widerstandsfähig gegen Stromausfälle, so dass die Batterie jederzeit abgeklemmt werden kann.
Telemetrie und Einstellung
Der Sensor kann über JETIBOX oder HOTT SMART-BOX, bzw. über das entsprechende Menü des Senders eingestellt werden. Das JETIBOX-Menü ist in drei Bereiche unterteilt:
- Aktuelle Werte - Zeigt die neuesten Telemetriedaten (Meereshöhe, Entfernung, Position, Temperatur) zusammen mit den Mindest- und Höchstwerten an.
- Reset Min/Max - Drücken Sie die Tasten LINKS und RECHTS zusammen, um die jährlichen Minimal- und Maximalwerte zurückzusetzen.
- Einstellungen - Grundeinstellungen des Sensors.
- Sprache - Sie können die Anzeigesprache des JETIBOX-Bildschirms festlegen.
- Zeitzone - Drücken Sie LINKS+RECHTS, um zwischen automatischer Zeitzonenerkennung und manueller Konfiguration zu wechseln. Im “Auto“-Modus wird die erkannte Zeitzone angezeigt, sobald der Sensor die aktuelle Position erfasst hat. Wenn die Zeitzone nicht korrekt erkannt wird, wechseln Sie in den Modus “Manuell“ und geben Sie die Zone mit den Tasten LINKS oder RECHTS ein. Zum Beispiel wird in Mitteleuropa GMT+1 verwendet, während für die US-Ostzeit GMT-5 eingestellt werden sollte.
- Sommerzeit - Wählen Sie “Ja“, wenn an Ihrem Standort derzeit Sommerzeit ist - diese Funktion addiert oder subtrahiert je nach aktueller Position eine Stunde.
- Geschwindigkeitsmessung - Wählen Sie “2D“, wenn Sie nur die Geschwindigkeit an Land messen möchten (zu Fuß, mit dem Boot oder dem Auto). Im Falle eines fliegenden Modells verwenden Sie den Messtyp “3D“, um auch die vertikale Komponente einzubeziehen. Dieser Parameter wirkt sich auf die Messung von Geschwindigkeit, Entfernung und Gesamtstrecke aus.
- GPS-Profil - Stellen Sie das GPS-Profil entsprechend dem Verwendungszweck ein. Dieser Parameter beeinflusst die Genauigkeit und Geschwindigkeit/Latenz der Positionsbestimmung.
- Flug 1G - Flugobjekte, die die Richtung nicht zu schnell ändern (große Modelle, Gleiter, Filmdrohnen...).
- Flug 2G - Schneller fliegende Objekte, die grundlegende Manöver ausführen (Trainer, EPP...).
- Flug 4G -Schnelle Flugobjekte, die Kunstflugmanöver ausführen können (3D-Kunstflugmodelle, F3A, Jets). Standardoption.
- Fußgänger/2D - Langsame Bewegung auf der Bodenoberfläche.
- Fahrzeug/2D - Modus geeignet für Autos.
- Aufzeichnungsperiode - Wählen Sie die Datenspeicherrate nach Ihren Wünschen. Der Maximalwert (10 Hz) speichert Daten 10 Mal pro Sekunde, um alle Flugdetails zu erfassen. Bitte beachten Sie, dass die Dateigröße mit höherer Speichergeschwindigkeit schneller wächst.
- Aufzeichnung - Legen Sie die Bedingung fest, die erfüllt sein muss, um mit der Speicherung der Aufzeichnung zu beginnen:
- Auto/Fixierung - Die Aufzeichnung beginnt automatisch, sobald die aktuelle Position korrekt ermittelt wurde.
- Auto/10kmh - Die Aufzeichnung beginnt automatisch, wenn die aktuelle Position ermittelt wurde und die Geschwindigkeit 10km/h überschreitet.
- Start/Stop - Die Aufzeichnung startet automatisch, wenn die aktuelle Position ermittelt wurde und die Geschwindigkeit 10km/h überschreitet. Bei Geschwindigkeiten unter 5km/h wird die Aufzeichnung nach 10 Sekunden gestoppt.
- Ausgangsposition - Wenn der Modus “Automatisch“ verwendet wird, wird die Ausgangsposition nach jedem Start bestimmt - dies ist die Position, an der der GPS-Logger seinen ersten Fix erhält. Die folgenden Telemetriedaten werden in Bezug auf die Ausgangsposition berechnet: relative Höhe, Entfernung und Azimut. Im Modus “Manuell“ wird immer die letzte bekannte Ausgangsposition verwendet und diese kann nur manuell geändert werden.
- Ausgangsposition jetzt festlegen - Drücken Sie die Tasten LINKS+RECHTS, um die aktuellen GPS-Koordinaten als Referenzpunkt festzulegen. Die Ausgangsposition wird unabhängig von der Einstellung Auto/Manuell aktualisiert. Die Ausgangsposition kann auch durch Drücken der Tasten LINKS+RECHTS auf dem Hauptbildschirm der JETIBOX-Telemetrie aktualisiert werden, unabhängig von den Einstellungen Auto/Manuell.
- Satellitenminimum - Legen Sie die Mindestanzahl von Satelliten fest, die erkannt werden müssen, bevor die aktuelle Position bestimmt wird. *
- Initial HDOP - Legen Sie die anfänglich gewünschte “horizontale Genauigkeitsabweichung“ vor der Bestätigung der Positionsbestimmung fest. Der HDOP-Parameter gibt an, wie sehr wir der aktuell angezeigten Position vertrauen können, wobei ein niedrigerer Wert besser ist. Ein Wert von 2,0 bedeutet zum Beispiel, dass die typische Abweichung der angezeigten Messung von der idealen Position bis zu 2 Meter beträgt.
- Service - In diesem Menü können Sie die Version des Geräts anzeigen und es auf die Standardeinstellungen zurücksetzen.
- Speicher/Frei - Zeigt den verfügbaren Speicherplatz im internen Speicher Flash an.
- Format - Sie können den Speicher Flash im Falle eines Dateisystemfehlers formatieren. Beachten Sie, dass bei diesem Vorgang alle Daten - auch die Konfiguration - gelöscht werden.
- Logs löschen - Löscht alle gespeicherten Flugprotokolle.
- Kompass, Kompass (Start) - Zeigt die aktuelle Magnetometermessung im Vergleich zur idealen Messung an, die auf der Grundlage der GPS-Position berechnet wird.
Graupner Hott Menü Struktur
Der GPS-Logger bietet Telemetrie als Standard-GPS-Telemetriemodul.

Futaba und Multiplex Anschluss
Futaba- und Multiplex-Systeme bieten keine drahtlose Gerätekonfiguration. Die Telemetrieübertragung ist über die folgenden festen Slots für Sensoren möglich:
| Futaba S.Bus2 | Multiplex MSB | |
|---|---|---|
| Geschwindigkeit | 8 | 9 |
| Höhe | 9 | 10 |
| Zeit | 10 | - |
| Vario | 11 | - |
| Breitengrad | 12–13 | - |
| Längengrad | 14–15 | - |
| Entfernung | - | 11 |
| Satelliten | - | 12 |
| Kurs | - | 13 |
| Hinweis | Manuelle Erkennung im Menü Linkage – Sensor. Wählen Sie den Sensor F1675 GPS am Slot 8. | Automatisch vom Sender erkannt. |
JETIBOX Anschluss
Schließen Sie den GPS-Logger an den Slot für den Sensor der JETIBOX/SMART-BOX an. Schließen Sie ein Netzteil mit geeigneter Spannung (4,5-8,4V) an. Nun können Sie den Sensor mit Hilfe der Pfeilen an der JETIBOX/SMART-BOX einstellen.

Komplette JETIBOX Menüstruktur

Analyse der Aufzeichnungen
Die kostenlose Software MAV Manager kann zum Herunterladen und Analysieren von GPS-Daten nach einem Flug verwendet werden. Sie kann von der Website des Herstellers heruntergeladen werden.
- Schließen Sie das MAV Sense USB-Interface an Ihren Computer an. Schließen Sie den GPS-Logger daran an.
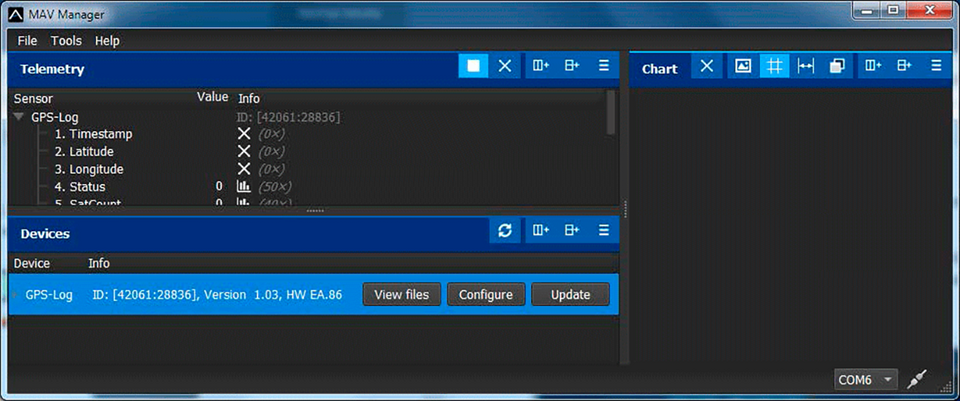
- Starten Sie MAV Manager und wählen Sie den richtigen Serienport am unteren Rand des Bildschirms (COMxx). Der GPS-Logger wird automatisch erkannt.
- Drücken Sie in der Liste der erkannten Geräte auf die Schaltfläche “Dateien anzeigen (View files)“.
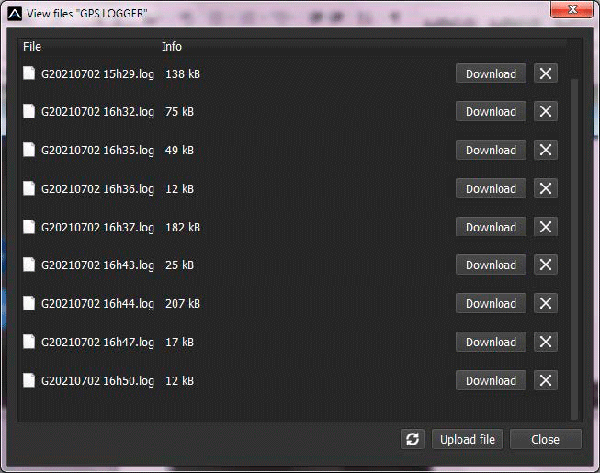
- Wählen Sie die Protokolldatei aus und klicken Sie auf die Schaltfläche „Herunterladen“. Sie werden aufgefordert, die Zieldatei auszuwählen. Sobald die Übertragung abgeschlossen ist, werden Sie gefragt, ob Sie die heruntergeladene Datei öffnen möchten. Drücken Sie “Ja“.
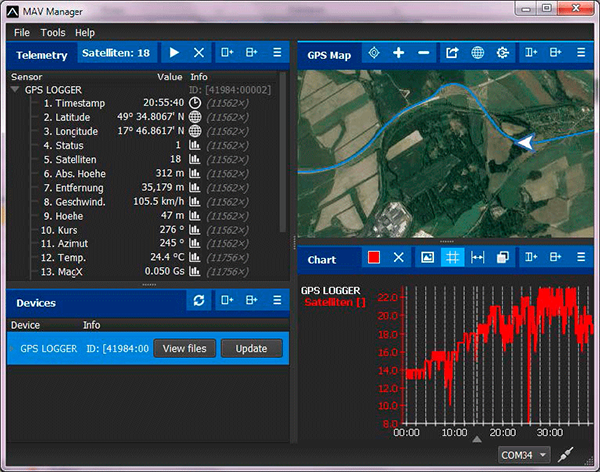
- Sie können die gespeicherten Daten in einem Diagramm oder auf einer Karte anzeigen. Sie können die Aufzeichnung erneut speichern, bzw. die Koordinaten in KML exportieren.



Sicherheitshinweise
- Verwenden Sie den GPS-Logger immer in einer trockenen Umgebung und überschreiten Sie nicht die in dieser Anleitung angegebenen gerätespezifischen Grenzwerte. Setzen Sie das Gerät niemals übermäßiger Hitze oder Kälte aus.
- Belasten Sie den GPS-Logger niemals mechanisch und achten Sie immer darauf, dass keine Kräfte auf den Sensor einwirken. Der Messchip kann durch Gewalteinwirkung beschädigt werden oder ungenau messen.
- Entfernen Sie nicht den Schrumpfschlauch vom Gerät und versuchen Sie nicht, es physisch zu verändern. Andernfalls könnte das Gerät zerstört werden und jegliche Garantieansprüche werden abgelehnt.
- Überprüfen Sie immer die Polarität der angeschlossenen Kabel. Vertauschen Sie niemals die Polarität - dies könnte das Gerät zerstören.
Firmware Update
Firmware-Updates für den GPS-Logger können von einem PC über das USB-Interface hochgeladen werden. Die erforderlichen Programme und Dateien sind unter www.mavsense.com verfügbar.
Installieren Sie die MAV Manager Software und Regler für das USB-Interface in Ihren Computer. Überprüfen Sie die Systemanforderungen.
- Schließen Sie das USB-Interface an den Computer an, starten Sie MAV Manager - Updater und wählen Sie den richtigen COM-Port aus.
- Schließen Sie den GPS-Logger wie unten gezeigt an.
- Wählen Sie die entsprechende *.BIN-Datei aus und drücken Sie die Schaltfläche Update.

PC-Konfiguration
Es ist möglich, die MAV Manager Software (Version 1.6.0 und neuer) zu verwenden, um alle Parameter des GPS-Loggers bequem zu konfigurieren, Echtzeit-Telemetrie anzuzeigen oder die Konfiguration zu sichern. Das Programmmenü enthält vier Schaltflächen auf der oberen Symbolleiste:
- Neu laden - erzwingt das erneute Laden der Konfiguration aus dem Gerät.
- Import - importiert Einstellungen aus einer Datei. Wenn Sie mehrere Sensoren haben und möchten, dass sie alle identisch konfiguriert sind, importieren Sie einfach die gleiche Einstellungsdatei in jedes Gerät.
- Export - exportiert die Einstellungen in eine Datei. Sie können ganz einfach eine Sicherungskopie der Konfiguration erstellen, die Sie in Ihrem PC speichern können. Sobald die Sicherungskopie erstellt ist, können Sie einfach mit den Einstellungen experimentieren und später zur ursprünglichen Konfiguration zurückkehren, indem Sie auf die Schaltfläche “Import“ klicken und die ursprünglich gespeicherte Datei auswählen.
- Standardeinstellungen - setzt den GPS-Logger auf die Werkseinstellungen zurück und lädt die gesamte Konfiguration neu.

Schließen Sie den GPS-Logger über USB an Ihren Computer an. Das Gerät wird automatisch vom Programm MAV Manager erkannt. Die Geräteeigenschaften sind durch Drücken der Schaltfläche “Konfigurieren“ verfügbar.



Echtzeit-Telemetrie mit min./max. Werten. MAV Manager ist auch in der Lage, eine Protokolldatei aus Echtzeit-Telemetriedaten zu erstellen, die angezeigt, analysiert, importiert und exportiert werden kann.
GPS-Logger-Einstellungen. Bei jeder Änderung der Konfiguration wird der neue Wert sofort in den Sensor übertragen und gespeichert. Eine zusätzliche Bestätigung ist nicht erforderlich.
Sie können die Telemetrieeinstellungen ändern, alle Aufzeichnungen löschen oder den internen Speicher Flash formatieren.
Hersteller
Der KAVAN Smart PRO GPS2 Logger wird in Tschechien von MAV Sense s.r.o. hergestellt.
E-mail: info@mavsense.com | Web: www.mavsense.com
Recycling (Europäische Union)

Elektrische Geräte mit dem durchgestrichenen Mülleimersymbol dürfen nicht mit normalem Hausmüll entsorgt werden, stattdessen müssen sie an eine spezialisierte Sammel- und Recyclinganlage gebracht werden. In den Ländern der EU (Europäische Union) dürfen elektrische Geräte nicht mit dem allgemeinen Hausmüll entsorgt werden (WEEE - Waste of Electrical and Electronic Equipment – Entsorgung der Elektro- und Elektronikaltgeräte - Richtlinie 2012/19 /EU). Sie können unerwünschte Geräte zur nächsten Sammelstelle oder zum nächsten Recyclingzentrum bringen. Die Geräte werden dann kostenlos entsorgt oder sicher recycelt. Durch die Abgabe unerwünschter Geräte können Sie einen wichtigen Beitrag zum Umweltschutz leisten.
EU Konformitätserklärung (Europäische Union)

KAVAN Europe s.r.o. erklärt hiermit, dass der KAVAN Smart PRO GPS2 Logger mit den Anforderungen der relevanten europäischen Richtlinien und harmonisierten Normen übereinstimmt. Der vollständige Text der EU-Konformitätserklärung ist unter der folgenden Internetadresse verfügbar: www.kavanrc.com/doc.
Garantie
Falls dieses Produkt gewartet werden muss, befolgen Sie bitte die folgenden Grundsätze: Wenn es möglich ist, verwenden Sie die Originalverpackung, um das Produkt einzupacken. Fügen Sie eine Beschreibung der Verwendung des Produkts und des aufgetretenen Problems bei. Datieren Sie den Beleg und vergewissern Sie sich, dass es dort Ihre vollständige Adresse und Telefonnummer gibt. Dieser Garantieschein berechtigt Sie zu einer kostenlosen Garantiereparatur des von der Firma KAVAN Europe s.r.o. gelieferten Produkts innerhalb von 24 Monaten. Die Garantie bezieht sich nicht auf Produkte oder Teile davon, die unsachgemäß installiert wurden (unsachgemäße oder fehlende Befestigung im Modell, mechanische Belastung der Kabel, unzureichende Kühlung, Verwendung von Steckern mit umgekehrter Polarität usw.), grob oder unsachgemäß behandelt wurden, (Belastung über die angegebenen Spezifikationen hinaus, Überschreitung der Versorgungsspannung, Überpolarisierung der Versorgungsspannung usw.) oder durch einen Unfall, eine Naturkatastrophe oder höhere Gewalt beschädigt wurden, oder Teile des Produkts, die von einer nicht autorisierten Person repariert oder verändert wurden. Setzen Sie dieses Produkt nicht hohen Temperaturen, Feuchtigkeit oder staubigen Umgebungen aus, wie dies auch bei anderen Produkten der Feinelektronik der Fall ist. Setzen Sie es nicht für längere Zeit dem direkten Sonnenlicht aus. Bitte beanspruchen Sie die Garantiereparatur im Geschäft, in dem Sie das Produkt gekauft haben.