KAVAN Smart PRO GPS2 Logger - Návod k použití
Úvod
Gratulujeme vám k zakoupení Smart PRO GPS2 Logger, telemetrického zařízení, které nabízí rychlou a přesnou detekci polohy v reálném čase a zpětnou vazbu. Pro dosažení maximální přesnosti a rozlišení využívá několik satelitních navigačních systémů. Logování všech dat je možné díky velké integrované paměti Flash. Uložená data lze stáhnout a analyzovat na počítači pomocí bezplatného softwaru MAV Manager.
Vlastnosti
- Malé rozměry, vysoká přesnost měření.
- Velká průmyslová paměť pro záznam dat.
- Nejnovější generace čipové sady GPS, jež podporuje několik satelitních systémů.
- 3osý magnetometr/kompas pro externí navigační účely.
- Záložní superkondenzátor pro rychlé načtení polohy po vypnutí.
- Měření napájecího napětí a jeho záznam.
- Automatická detekce telemetrie: Duplex EX, Hott, MSB, S.Bus2, P²Bus.
- Automatická detekce časového pásma.
- Konfigurace přes vysílač nebo program MAV Manager.
- Aktualizace firmwaru.
Technické údaje
- Rozměry: 28×30×9 mm
- Hmotnost: 14 g
- Paměť: 256 MB
- Podporované navigační systémy: GPS, GALILEO, GLONASS
- Doba záznamu (5 vzorků/s): 66 hodin
- Frekvence vzorkování: 10 Hz, 5 Hz, 2 Hz, 1 Hz
- Životnost paměti Flash: 100 000 přepisovacích cyklů
- Provozní proud: 50 mA
- Provozní teplota: (-20)–85 °C
- Napájecí napětí: 3,5–8,4 V
- Telemetrie: FPort, Duplex EX, Multiplex MSB, Graupner Hott, Futaba S.Bus2, PowerBox P²Bus
- Stavová LED: ANO
- Citlivost přijímače GNSS: -167 dBm
- Maximální přetížení GNSS: 4G
Dostupná telemetrie
Možnosti telemetrie závisí na použitém systému rádiového řízení. Kompletní data se automaticky ukládají do interní paměti Flash.
| Parametr | Popis |
|---|---|
| Časová značka | Aktuální přesný čas GPS. |
| Zeměpisná šířka | Souřadnice sever/jih. |
| Zeměpisná délka | Souřadnice východ/západ. |
| Stav | Indikace aktivity (1=korektní pozice) nebo poruchového stavu. |
| Satelity | Počet detekovaných satelitů. |
| Abs. výška | Výška nad hladinou moře. |
| Vzdálenost | Vzdálenost od „Výchozí pozice“. |
| Rychlost | 2D/3D rychlost vztažená k zemi. Typ měření rychlosti je možné nastavit v konfiguraci. |
| Rel. výška | Výška relativní k „Výchozí pozici“. |
| Kurs | Směr letu. Hodnoty jsou v rozsahu 0°-359°: 0° = sever, 90°=východ, 180°=jih, 270°=západ. Jestliže je rychlost nulová, kurs se vypočítává podle kompasu. |
| Azimut | Pozice modelu vzhledem k „Výchozí pozici“. Hodnoty jsou v rozsahu 0°-359°: 0° = severně, 90°=východně, 180°=jižně, 270°=západně. |
| Teplota | Interní teplota. |
| Magnetometer X/Y/Z | Hodnoty tříosého magnetometru. Mohou být použity pro další výpočty. |
| Napětí | Napětí přijímače (pouze logování). |
| Trasa | Celková vzdálenost překonaná během letu. |
Instalace
Připojte Smart PRO GPS2 Logger k telemetrickému portu přijímače. Umístěte senzor na horní část letadla tak, aby jeho anténa nebyla stíněna v žádném směru. Stínicí materiály, jako je kov, uhlík nebo cokoli vodivého, mohou snížit schopnost správné detekce polohy. Dále se ujistěte, že antény systému 2,4GHz jsou umístěny alespoň 20 cm nebo dále od senzoru GPS Loggeru. Snažte se vyhnout mechanickému namáhání snímače a vyvarujte se jakémukoli těsnému kontaktu se součástmi produkujícími teplo (jako jsou motory nebo regulátory otáček). Použijte měkkou oboustrannou lepicí pásku, případně suchý zip.
Pro dobrý výkon integrovaného magnetometru je nutné instalovat zařízení minimálně 20 cm od magnetizovaných předmětů a kabelů napájejících serva/motory. Dodržujte orientaci zařízení vzhledem ke směru letu, jak je znázorněno na obrázku níže.

Zapněte přijímač s připojeným GPS loggerem. Červená LED jednou blikne, čímž signalizuje správnou inicializaci. Po několika sekundách (případně minutách, pokud bylo zařízení bez napájení déle než jeden den) senzor ohlásí „3D fix“, tj. nalezení správné polohy. Od tohoto okamžiku může začít ukládání dat do paměti Flash, a to v závislosti na splnění podmínky, která byla nastavena v konfiguraci. Záznam je indikován blikáním LED synchronně se vzorkovací frekvencí.
Při každém spuštění logování se v interní paměti Flash vytvoří nový soubor. Soubory záznamů jsou pojmenovány podle aktuálního data a času v následujícím formátu:
„GYYYYMMDD HHhNN.log“ (kde YYYY = rok, MM = měsíc, DD = den, HH = hodina and NN = minuta). Příklad: G20210605 20h47.log
Staré záznamy není nutné mazat ručně. Jakmile není dostatek volného místa, nejstarší soubory protokolu se automaticky smažou. Interní souborový systém je robustní a odolný proti výpadkům napájení, takže baterii lze kdykoli odpojit.
Telemetrie a nastavení
Senzor je možné nastavovat přes JETIBOX nebo HOTT SMART-BOX, případně pomocí odpovídajícího menu vysílače. Menu JETIBOXu je rozdělené do tří sekcí:
- Aktuální hodnoty - Zobrazuje nejnovější telemetrické údaje (nadmořská výška, vzdálenost, poloha, teplota) spolu s minimy a maximy.
- Reset Min/Max - Pro roční reset minimálních a maximálních hodnot stiskněte dohromady tlačítka VLEVO a VPRAVO.
- Nastavení - Základní nastavení senzoru.
- Jazyk - Můžete specifikovat jazyk zobrazení na JETIBOXu.
- Časová zóna - Stiskněte VLEVO+VPRAVO pro přepnutí mezi automatickou detekcí časového pásma a manuální konfigurací. Pokud je použit režim „Auto“, detekovaná časová zóna se zobrazí, jakmile má senzor načtenu aktuální polohu. Pokud je časové pásmo detekováno nesprávně, přepněte do režimu „Manuální“ a zadejte zónu pomocí kláves VLEVO nebo VPRAVO. Například střední Evropa používá GMT+1, zatímco pro americký východní čas je třeba nastavit GMT-5.
- Letní čas - Zvolte „Ano“, jestliže je právě období letního času v dané lokalitě – tato funkce přičte nebo odečte hodinu v závislosti na aktuální pozici.
- Měření rychlosti - Nastavte možnost „2D“ v případě, že potřebujete použít pouze měření pozemní rychlosti (chůze, loď či auto). V případě létajícího modelu použijte typ měření „3D“ pro zahrnutí i vertikální složky. Tento parametr ovlivňuje měření rychlosti, vzdálenosti a celkové trasy.
- GPS profil - Nastavte profil GPS podle předpokládaného použití. Tento parametr ovlivňuje přesnost a rychlost/latenci detekce polohy.
- Letový 1G - Létající objekty, které příliš rychle nemění směr (velké modely, kluzáky, filmové drony...).
- Letový 2G - Rychleji létající objekty, které provádějí základní manévry (trenéry, EPP...).
- Letový 4G - Rychle létající objekty schopné akrobacie (3D akrobatické modely, F3A, jety). Výchozí možnost.
- Chodec/2D - Pomalý pohyb po zemském povrchu.
- Vozidlo/2D - Režim vhodný pro auta.
- Perioda záznamu - Zvolte rychlost ukládání dat podle svých preferencí. Maximální hodnota (10Hz) ukládá data 10krát za sekundu a pokryje tak všechny detaily letu. Vezměte prosím na vědomí, že s vyšší rychlostí ukládání dat také roste rychleji velikost souborů.
- Záznam - Nastavte podmínku, která musí být splněna pro zahájení ukládání záznamu:
- Auto/Fixace - Záznam se spustí automaticky, jakmile je správně určena aktuální pozice.
- Auto/10kmh - Záznam se spustí automaticky, jakmile je určena aktuální pozice a rychlost překročí 10km/h.
- Start/Stop - Záznam se spustí automaticky, jakmile je určena aktuální pozice a rychlost překročí 10km/h. Ukládání se ukončí po 10 sekundách při rychlosti menší než 5km/h.
- Typ počátku - Pokud je použit „Automatický“ režim, výchozí poloha je určena po každém spuštění – je to pozice, kde GPS Logger získá první zafixování polohy. Následující telemetrické údaje se vypočítávají s ohledem na výchozí pozici: Relativní výška, vzdálenost a azimut. V režimu „Manuální“ se použije vždy poslední známá výchozí pozice a tu lze změnit pouze ručně.
- Nastavit počátek nyní - Stisknutím tlačítek VLEVO+VPRAVO můžete nastavit aktuální GPS souřadnice jako referenční bod. Výchozí poloha se aktualizuje nezávisle na nastavení Auto/Manual. Výchozí polohu je možné aktualizovat také stisknutím tlačítek VLEVO+VPRAVO na hlavní obrazovce telemetrie JETIBOXu.
- Minimum satelitů - Nastavte minimální počet satelitů, které je potřeba detekovat předtím, než se začne určovat aktuální pozice.*
- Počáteční HDOP - Nastavte počáteční požadovanou „horizontální odchylku od přesnosti“ před potvrzením zafixování polohy. Parametr HDOP říká, jak moc můžeme věřit aktuálně indikované poloze, přičemž nižší hodnota je lepší. Například hodnota 2.0 uvádí, že typická odchylka měření indikované od ideální polohy je až 2 metry.
- Servis - V této nabídce můžete zobrazit verzi zařízení a resetovat jej do výchozího nastavení.
- Paměť/Volných - Ukazuje dostupné místo ve vnitřní paměti Flash.
- Formátovat - V případě chyby systému souborů můžete naformátovat paměť Flash. Upozorňujeme, že tento postup vymaže všechna data – dokonce i konfiguraci.
- Smazat záznamy - Smaže všechny uložené letové záznamy.
- Kompas, Kompas (Počátek) - Zobrazuje aktuální měření magnetometru v porovnání s ideálním měřením, které je vypočítáno na základě polohy GPS.
GPS Logger nabízí telemetrii jako standardní telemetrický modul GPS.

Zapojení Futaba a Multiplex
Systémy Futaba a Multiplex nenabízejí bezdrátovou konfiguraci zařízení. Telemetrický přenos je možný pomocí následujících pevných slotů pro senzory:
| Futaba S.Bus2 | Multiplex MSB | |
|---|---|---|
| Rychlost | 8 | 9 |
| Výška | 9 | 10 |
| Čas | 10 | - |
| Vario | 11 | - |
| Zeměpisná šířka | 12–13 | - |
| Zeměpisná délka | 14–15 | - |
| Vzdálenost | - | 11 |
| Satelity | - | 12 |
| Kurs | - | 13 |
| Poznámka | Ruční detekce v menu Linkage - Sensor. Zvolte senzor F1675 GPS na slotu 8. | Automaticky detekováno vysílačem. |
Zapojení JETIBOXu
Zapojte GPS LOGGER do slotu pro senzor na JETIBOXu/SMART-BOXu. Připojte napájení s vhodným napětím (4,5–8,4V). Nyní můžete nastavit senzor za použití šipek na JETIBOXu/SMART-BOXu.


Analýza záznamů
Bezplatný software MAV Manager je možné použít ke stažení a analýze GPS dat po letu. Můžete si jej stáhnout z webových stránek výrobce.
- Připojte MAV Sense USB interface do počítače. Do něj zapojte GPS Logger.
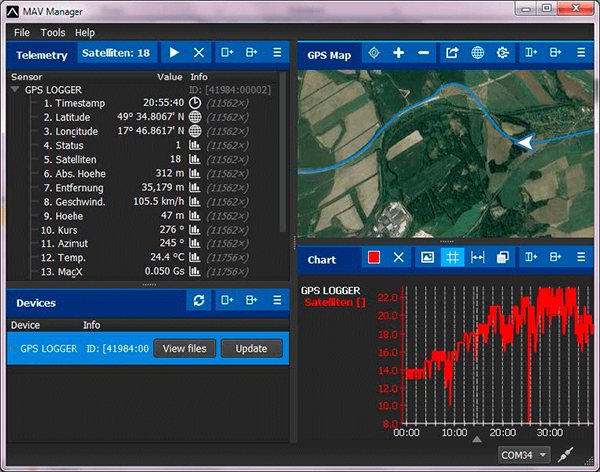
- Spusťte MAV Manager a vyberte správný sériový port v dolní části obrazovky (COMxx). GPS Logger bude rozpoznán automaticky.
- V seznamu detekovaných zařízení stiskněte tlačítko „Zobrazit soubory (View files)“.

- Vyberte soubor záznamu a stiskněte tlačítko „Stáhnout“. Budete požádáni o výběr cílového souboru. Jakmile přenos skončí, budete dotázáni, zda chcete stažený soubor otevřít. Stiskněte „Ano“.
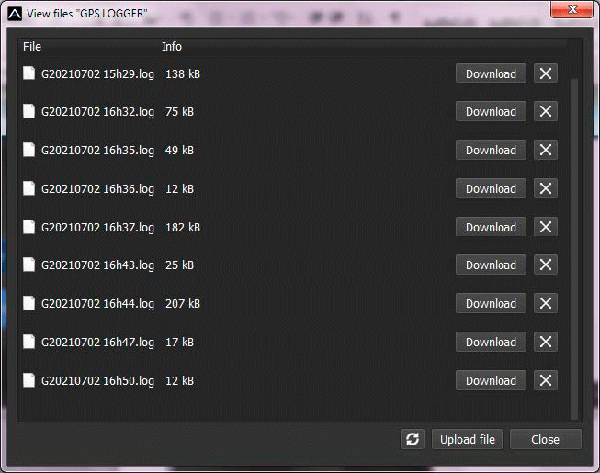
- Uložená data můžete zobrazit v grafu či na mapě. Záznam můžete znovu uložit, případně lze exportovat koordináty do KML.



Bezpečnostní informace
- Používejte GPS Logger vždy v suchém prostředí a nepřekračujte limity pro dané zařízení, které jsou uvedeny v tomto návodu. Nikdy nevystavujte zařízení přílišnému horku ani chladu.
- Nikdy GPS Logger mechanicky nenamáhejte a vždy se snažte, aby na senzor nepůsobily žádné síly. Měřicí čip může být působením síly poškozen, případně může měřit nepřesně.
- Neodstraňujte smršťovací bužírku ze zařízení a nesnažte se jej fyzicky upravovat. Mohlo by tímto dojít k destrukci zařízení a jakékoli nároky na reklamaci budou zamítnuty.
- Vždy zkontrolujte polaritu připojených kabelů. Nikdy polaritu neobracejte - mohlo by tím dojít k destrukci zařízení.
Aktualizace Firmware
Aktualizace firmwaru pro GPS Logger se lze nahrát z PC pomocí USB interface. Požadované programy a soubory jsou k dispozici na stránkách www.mavsense.com.
Install the MAV Manager software and the USB drivers on your computer. Check the system requirements.
- Connect the USB interface to your PC, run MAV Manager - Updater and select the correct COM Port.
- Connect the GPS Logger according to the picture below.
- Select the correct *.BIN file and press the Update button.

PC configuration
It is possible to use the MAV Manager software (1.6.0 and later) to conveniently configure all device settings, display real-time telemetry and make a configuration backup. The configuration menu contains four buttons in the top toolbar:
- Refresh - forces the configuration to be reloaded from the device.
- Import - imports the settings from a file. If you have several devices and want all of them with identical settings, import the same settings to each device.
- Export - exports the settings from the device to a file. You can easily create a backup configuration stored on your PC. After making the backup, you may easily experiment with the settings and later revert to the original configuration by pressing the “Import” button and choosing the original exported file.
- Reset default - resets the device to factory defaults and reloads all the settings.

Connect the GPS Logger to your PC using the USB interface. The device will be automatically detected by the MAV Manager. The device properties are available after pressing the “Configure” button.



Real-time telemetry with min/max values. The MAV Manager can also create a log file from the real-time telemetry data, which can be viewed, analyzed, imported and exported.
GPS Logger settings. Every time you make any change in the configuration, the new value is immediately transferred to the device and saved to memory. There is no need for additional confirmation.
You can modify the telemetry settings or clear log files from the internal Flash.
Conclusion
Manufacturer
KAVAN Smart PRO GPS2 Logger is made in Czechia by MAV Sense s.r.o.
E-mail: info@mavsense.com | Web: www.mavsense.com
Recycling and waste disposal note (European Union)

Electrical equipment marked with the crossed-out waste bin symbol must not be discarded in the domestic waste; it should be disposed of via the appropriate specialised disposal system. In the countries of the EU (European Union) electrical devices must not be discarded via the normal domestic waste system (WEEE - Waste of Electrical and Electronic Equipment, Directive 2012/19/EU). You can take your unwanted equipment to your nearest public collection point or recycling centre, where it will be disposed of in the proper manner at no charge to you. By disposing of your old equipment in a responsible manner you make an important contribution to the safeguarding of the environment.
EU declaration of conformity (European Union)

Hereby, KAVAN Europe s.r.o. declares that the KAVAN Smart PRO GPS2 Logger is in compliance with the essential requirements as laid down in the EU directive(s) concerning electromagnetic compatibility. The full text of the EU Declaration of Conformity is available at www.kavanrc.com/doc.
Guarantee
The KAVAN Europe s.r.o. products are covered by a guarantee that fulfils the currently valid legal requirements in your country. If you wish to make a claim under guarantee, please contact the retailer from whom you first purchased the equipment. The guarantee does not cover faults which were caused in the following ways: crashes, improper use, incorrect connection, reversed polarity, maintenance work carried out late, incorrectly or not at all, or by unauthorised personnel, use of other than genuine KAVAN Europe s.r.o. accessories, modifications or repairs which were not carried out by KAVAN Europe s.r.o. or an authorised KAVAN Europe s.r.o., accidental or deliberate damage, defects caused by normal wear and tear, operation outside the Specification, or in conjunction with equipment made by other manufacturers. Please be sure to read the appropriate information sheets in the product documentation.